Самостійне опрацювання матеріалу. Тема. Система координат верстатів з програмним керуванням. Зв’язок систем координат
1 Види систем координат
2 Стандартна система координат
3 Зв’язок систем координат
2. Стандартна система координат
Систему координат верстата, обрану згідно з рекомендаціями Міжнародної системи стандартів ISO, прийнято називати стандартною. Стандартна система координат - це права прямокутна (декартова) система координат. У правій прямокутній системі додатні напрямки осей координат визначаються за правилом "правої руки" (див. рис. 2): великий палець - вісь X, вказівний - вісь Y, середній - вісь Z. Зовнішній бік долоні повертають до оброблюваної поверхні деталі; вісь Х завжди горизонтальна, вісь Z суміщається з віссю інструмента, вісь Y перпендикулярна до осей X і Z. Пальці визначають додатний напрям переміщення інструмента або вісь деталі, якщо вона обертається
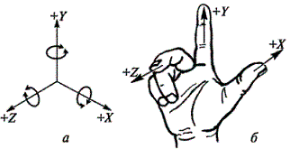
Рисунок 2 - Розташування осей координат на верстатах з ЧПК (а); визначення осей координат та їх напрямів за правилом "правої руки" (б)
Початок стандартної системи координат верстата звичайно збігається з базовою точкою затискного пристрою (наприклад, з центром планшайби токарного патрона або з центром центруючої оправки, по якій базується деталь на свердлильному чи фрезерному верстаті і т. д.). Осі координат типових верстатів показані на рис. 3. У системі координат для верстатів вісь Z паралельна до поздовжньої подачі супорта (збігається з віссю шпинделя верстата), вісь X паралельна до поперечної подачі супорта (рис. 3, а). Для фрезерних і свердлильних верстатів прийняті такі осі: вісь Х паралельна до поздовжньої подачі хрестового стола, вісь Y паралельна до поперечної подачі стола, вісь Z паралельна до осі шпинделя (рис. 3, б)
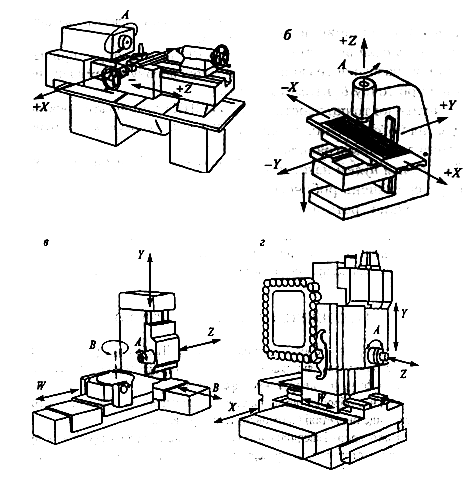
Рисунок 3 - Координатні осі верстатів з ЧПК: а - токарного; б - фрезерного; в - розточного; г - багатоопераційного;
А - основний робочий рух; В - рух позиціювання деталі; X, Y, Z - основні осі координат; W - вторинна вісь, паралельна до осі Z
Якщо на верстаті є кілька робочих органів для переміщення інструментів (наприклад, на оброблюваному центрі), то вказані позначення стосуються первинних осей. Для позначення вторинних осей, паралельних до первинних, використовують літери U (відповідно до Х), V (відповідно до Y), W (відповідно до Z)
Нульова точка верстата – це точка, що прийнята за початок системи координат верстата. Вона визначається відносно конструктивних елементів верстата. Від нульової точки верстата задаються в КП абсолютні розміри переміщення його робочих органів, якщо початок відліку переміщень не зміщений за допомогою плаваючого нуля
Плаваючим нулем називають здатність ПЧПК розміщувати початок відліку переміщень робочого органа у будь-яке положення відносно нульової точки верстата
Вихідна точка верстата (ВТ) - це точка, що визначена відносно нульової точки верстата та вказує на початок роботи на КП (наприклад, вершина різця). Вихідні точки верстата обирають з умови забезпечення мінімальних допоміжних ходів, безпечної зміни інструмента та зручного закріплення заготовки на верстаті