Самостійне опрацювання матеріалу. Тема. Система координат верстатів з програмним керуванням. Зв’язок систем координат
1 Види систем координат
2 Стандартна система координат
3 Зв’язок систем координат
1. Види систем координат
В програмі обробки деталі повинні бути закладені величина і напрямок переміщень інструменту. Для цього положення вузлових точок необхідно визначити за допомогою тієї чи іншої системи координат. Найбільш часто використовуються прямокутні (декартові), циліндричні і сферичні системи координат (див. рис.1,а-в)
В прямокутній декартовій системі координатами де-якої точки А називаються взяті з визначеним знаком відстані х, у і z від цієї точки до трьох взаємоперпендикулярних координатних площин. Точка перетину координатних площин називається початком координат, а координати х, у і z – відповідно абсцисою, ординатою і аплікатою
В циліндричній системі координат положення точки в просторі задається полярними координатами: радіусом ρ, полярним кутом φ (положення проекції точки на основній площині), аплікатою z (відстанню точки до основної площини)
В сферичній системі координат точка задається довжиною радіус-вектора R, довготою ψ і полярним кутом θ. Перехід із однієї системи координат до другої здійснюється шляхом нескладних перерахунків
Таким чином, у визначеній системі координат контур деталі і траєкторія переміщення центра інструмента відносно цього контуру можуть бути представлені геометричними елементами з опорними точками, завданими координатами або у просторі, або на площині
На траєкторії руху центра інструмента можуть бути назначені також технологічні опорні точки, тобто точки, де змінюються які-небуть технологічні параметри, наприклад подача інструмента, точки тимчасової зупинки зі вказівкою часу зупинки. При обробці деталі інструмент може рухатися або в одній площині – плоска обробка, при якій використовуються дві керуємі координати, або мати складний рух у просторі – об’ємна обробка. Опорні точки на траєкторії руху інструмента дозволяють представити цю траєкторію як визначену послідовність точок, яку проходить центр інструмента при обробці деталі. Кожне з положень (кожна опорна точка) у обраній системі координат може бути визначене числами, наприклад координатами. Поєднання таких чисел і буде представляти основну частину програми роботи верстата, виражену у числовому вигляді
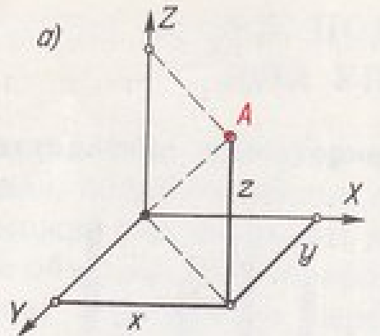
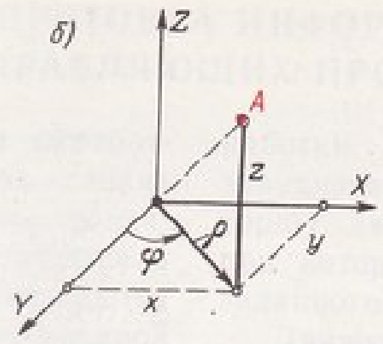
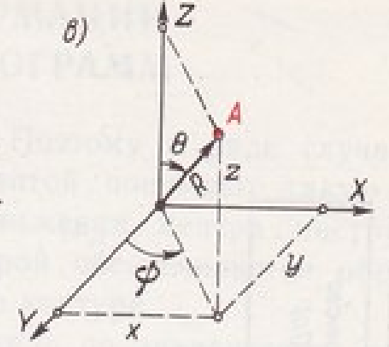
Рисунок 1 - Прямокутна система координат (а); циліндрична система координат (б); сферична система координат (в)